



Ethernet倾角传感器是辉格科技开发的一款多功能型以太网接口的倾角传感器,集成了TCP/IP协议栈,用户可以轻松完成倾角传感器产品的网络功能。既可满足快速高精度测量倾斜角度,也可对零点指标有特殊要求和实现静态与动态相结合的测量要求。
Ethernet倾角传感器集成10/100M自适应以太网接口,具有TCP Server, TCP Client, UDP等多种工作模式,支持最多四个连接,支持域名访问等功能。
通过采用TS-QJ003-05-14选件,多个Ethernet倾角传感器可以轻松组建倾角测量局域网络系统,同时TS-QJ003-05-15选件能将局域网扩展到广域网络中,实现异地的数据查询和测量功能的设置。
Ethernet倾角传感器具有强大的倾角测量能力:
√ ±0.02%FS线性度
√ ±0.005°的零点偏置值
√ ±0.008°的多次上电重复性,满足各种临时性/永久性的高精度测量要求
√ 与陀螺仪模块配套,实现静态和动态的角度测量,以及快速粗调和精确细调的平台调节能力
√ 与振动模块配套,实时的高速FFT运算,直接输出振动频率和幅度数据,消除振动影响
√ 与GPS模块配合,实现不同安装位置的数据同步采集以及位置和运动速度监控
√ 进一步明确了零点偏置、重复性与迟滞、上电重复性等对测量精度有重要影响的性能指标
√ 内部增强的高级智能化算法,可大幅度降低横轴误差,提升了实际的倾角测量水平,摒弃了传统的对倾角测量精度的不全面理解
√ 大幅度降低了因安装过程中的实际倾斜方向与传感器敏感方向不一致而造成的更大的测量误差
√ 用户可对传感器的零点、波特率、本地重力加速度值、零位校正、振动抑制的滤波系数、ID地址及刷新率等各种参数进行设置,并查询传感器的出厂数据
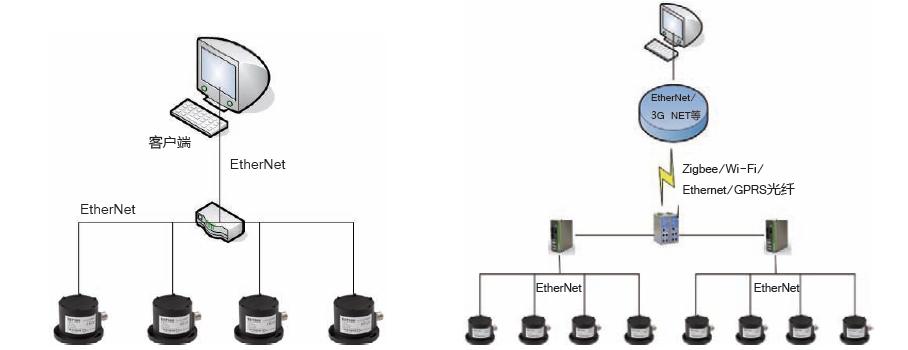
图1 Ethernet倾角测量网络系统
在TCP服务器(TCP Server)模式下,Ethernet倾角传感器不会主动与其它设备连接。它始终等待客户(TCP Client)的连接,在与客户端建立TCP连接后即可进行双向数据通信。
在TCP客户端(TCP Client)模式下,Ethernet倾角传感器将主动与预先设定好的TCP服务器连接。如果连接不成功,Ethernet倾角传感器将会根据设置的连接条件不断尝试与TCP服务器建立连接。在与TCP服务器端建立TCP连接后即可进行双向数据通信。
在UDP模式下,与以上模式使用的TCP协议不同,UDP模式使用UDP协议进行数据通信。UDP是一种不基于连接的通信方式,它不能保证发往目标主机的数据包被正确接收,所以在对可靠性要求较高的场合需要通过上层的通信协议来保证数据正确。但是因为UDP方式是一种较简单的通信方式,所以它不会增加过多的额外通信量,可以提供比TCP方式更高的通信速度,以保证数据包的实时性。事实上,在网络环境比较简单,网络通信负载不是太大的情况下,UDP工作方式并不容易出错。工作在这种方式下的设备,地位都是相等的,不存在服务器和客户端。
Ethernet倾角传感器与以太网交换机配合使用组成多节点网络测量,测量数据可以通过路由器接入(通过wifi/ zigbee/ehternet /GPRS等)以太网或其他网络(3G网、GPRS网)中,远端主机通过网络访问每个传感器节点。
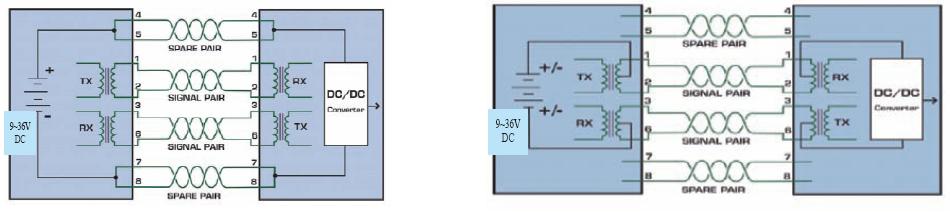
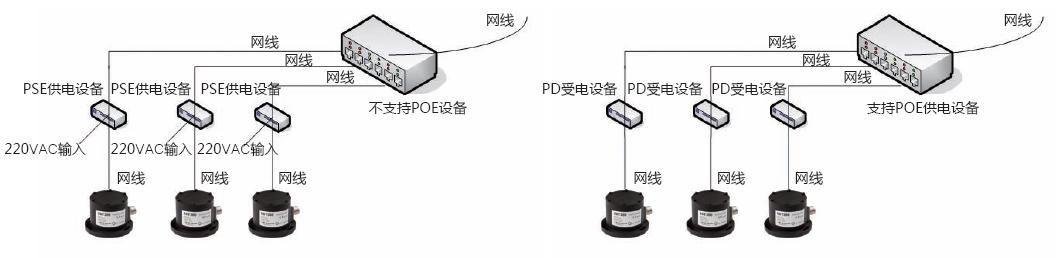
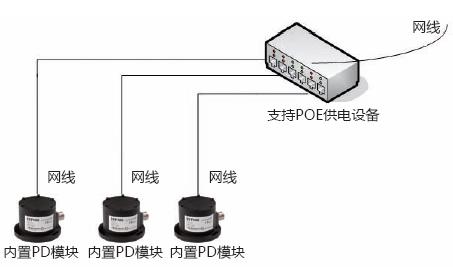
关于POE以太网供电使用,802.3af标准定义了PI(Power interface:PSE/PD与网线的接口),定义了两种方式AlternativeA(1,2,3,6信号线)和Alternative B(4,5,7,8空闲线)的供电模式,如下说明:
技术参数
表1 技术参数表
| 量程 | ±5° | ±10° | ±15° | ±30° | ±45° | ±60° | |
| 综合绝对精度①(@25 ℃) | ±0.01° | ±0.015° | ±0.02° | ±0.04° | ±0.06° | ±0.08° | |
| 综合绝对精 度分项参数 |
绝对线性度(LSF,%FS) (最小二乘法拟合) |
±0.06 | ±0.03 | ±0.03 | ±0.03 | ±0.02 | ±0.02 |
| 横轴误差② | ±0.1%FS | ||||||
| 零点偏置③ | ±0.005° | ±0.008° | |||||
| 重复性 | ±0.0025° | ||||||
| 迟滞性 | ±0.0025° | ||||||
| 允许安装对准偏差④ | ±4.0° | ±3.0° | ±2.5° | ±1.5° | ±1.2° | ±1.2° | |
| 输入轴非对准度 | ≤±0.1° | ||||||
| 灵敏度温漂系数 | ≤100ppm/℃ | ≤50ppm/℃ | |||||
| 零点温漂系数 | ≤0.003°/ ℃ | ||||||
| 零点上电重复性⑤ | ±0.008° | ||||||
| 分辨力 | 0.0025° | ||||||
| 长期稳定性⑥ | ≤0.02° | ||||||
| 测量轴数 | 单轴、双轴 | ||||||
| 功能 | 可设置或调整:零点、波特率、本地重力加速度值、零位校正、振动抑制的滤波系数、 ID 地址及刷新率等 |
||||||
| 输出 | Ethernet(TCP/IP 和UDP 协议) | ||||||
| 冷启动预热时间 | 60s | ||||||
| 响应时间⑦ | 0.3s(@t90) | ||||||
| 输出刷新率 | 5Hz(标准配置),可选10Hz 或20Hz | ||||||
| 响应频率 | 3Hz @-3dB | ||||||
| 输入电压 | 9~36VDC | ||||||
| 功耗 | 平均工作电流≤200mA (25℃&24VDC) | ||||||
| 工作温度 | -40~85℃ | ||||||
| 储存温度 | -60~100℃ | ||||||
| 绝缘电阻 | 100MΩ | ||||||
| 平均无故障时间MTBF | ≥25000小时/次 | ||||||
| 抗冲击 | 100g@11ms,三轴向(半正弦波) | ||||||
| 抗振动 | 8grms,20~2000Hz | ||||||
| 防护等级 | IP67 | ||||||
| 连接器 | 军用航空连接器(满足GJB101A-1997 标准 ) | ||||||
| 重量 | 420g(不含接插件和电缆线) | ||||||
| ① 综合绝对精度是指在常温条件下,对传感器的非线性、重复性、迟滞、零点偏置以及横轴误差的平方根值。 |
 |
| ② 零点偏置是指传感器在没有角度输入的情况下(如绝对水平面),传感器测量输出不为零,即为零点偏置。 |
| ③ 横轴误差是指当传感器在垂直于其灵敏轴方向施加一定的加速度或者倾斜一定的角度时所产生的误差。如对于测量范围为±10°的单轴(假定X方向为倾角测量方向)倾角传感器,在空间垂直于X方向发生13°的倾斜时(此时实际被测量的倾斜角度保持不变,如为+8.505°),传感器的输出信号会因为这个13°的倾斜而产生额外误差,这个误差我们称为横轴误差。TS-QJ300的横轴误差为0.1%,因此,产生的额外误差为0.1%×13°=0.013°,而传感器实际输出的角度应为8.518°(=8.505°+0.013°)。在TS-QJ300系列中,该误差已经包含于综合绝对精度指标内。 |
| ④ 允许安装对准偏差是指传感器在实际安装过程中,允许传感器的安装偏差。一般地,TS-QJ300传感器在安装时要求倾斜方向与传感器的指定边沿保持平行或者垂直,该指标表示可以允许有一定的安装角度偏差而不影响传感器的测量精度。 |
| ⑤ 零点上电重复性是指传感器在多次重复通电—断电—通电下的零点的重复性。 |
| ⑥ 长期稳定性是指传感器在25℃下,经过一年的持续通电测试而统计出的最大和最小输出值的偏差。 |
| ⑦ 响应时间是指传感器在一个阶跃角度变化(如在5ms内从-10°变化到+10°),传感器的输出达到标准值的90%时所需要的时间。该指标不同于传感器的建立时间。 |
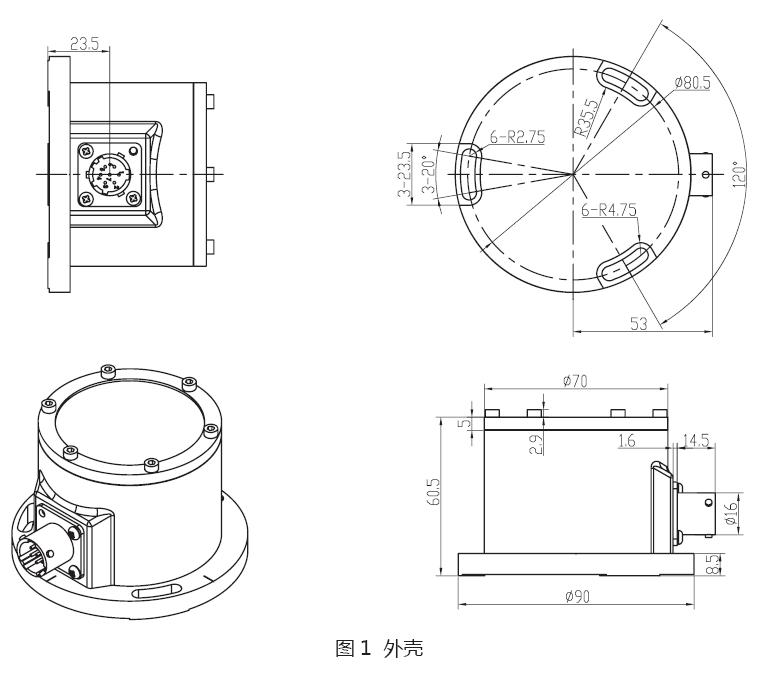
外形尺寸(mm)
接线定义
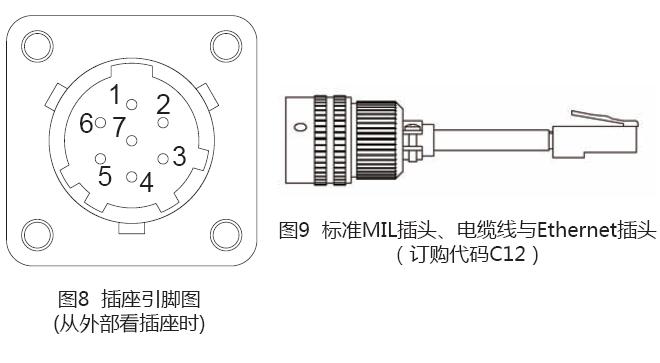
表2 引脚定义
| 引脚号 | 功能 |
| 1 | 电源正 |
| 2 | 电源地 |
| 3 | 屏蔽地 |
| 4 | E-RXD+ |
| 5 | E-RXD- |
| 6 | E-TXD+ |
| 7 | E-TXD- |
例如:需要购买一台双轴Ethernet倾角传感器,测量范围±30°,常温倾角测量精度±0.02°,-20~60℃温度下的精度±0.02°,输出Ethernet,25m电缆配插头,带振动抑制功能,应选
择的传感器型号为:TS-QJ302-30-G9-F5 -00-C12-D3(25m)。
另外需要部分选件(见选件表):
上位机软件——订货号TS-QJ003-04-09
磁性安装底座——订货号TS-QJ003-01-01
8口工业以太网交换机——订货号TS-QJ003-05-14
配件&选件
表3 配件表
| 项目 | 订货号码 | 名称 | 功能 |
| 功能模块 | F1 | GPS 模块 | 水平定位精度2.5m CEP; 2.0m @ SBA S 本地重力加速度自动修正 时间脉冲精度: 30ns RMS 原始数据刷新率:4Hz 速度精度:0.1m/s 接收机类型:GPS L1 频段,C/A代 码 可选择更高定位精度模块 |
| F4 | 陀螺仪模块 | 测量X、Y、Z 轴方向瞬间角度变化量 测量范围:±100°/s、±250°/s、±400°/s In-run 零点精度:±0.02°/s 非线性:0.1%FS 带宽:50Hz,噪声密度:0.02°/s/√Hz 可选择更高精度模块 |
|
| F5 | 振动模块 | 三轴向振动检测,频率响应≤5 kHz 量程可选择0 g ~±1 g/±5 g/±10 g/±20 g 实时采样率:20.48 kSPS 可编程滤波器,11 个设定值 FFT, 512-point, real valued,全三轴(x,y,z) 存储: 14 FFT 记录,全三轴(x,y,z) 可编程报警,6 个频谱段 |
|
| 温度补偿 | D1 | 温度补偿 | 0~60℃温度补偿范围,温漂精度±0.01°@≤±30°量程 |
| D2 | 温度补偿 | 0~60℃温度补偿范围,温漂精度±0.01°@>±30°量程 | |
| D3 | 温度补偿 | -20~60℃温度补偿范围,温漂精度±0.02°@≤±30°量程 | |
| D4 | 温度补偿 | -20~60℃温度补偿范围,温漂精度±0.02°@>±30°量程 | |
| D5 | 温度补偿 | -30~60℃温度补偿范围,温漂精度±0.03°@≤±30°量程 | |
| D6 | 温度补偿 | -30~60℃温度补偿范围,温漂精度±0.03°@>±30°量程 | |
| D7 | 温度补偿 | -40~65℃温度补偿范围,温漂精度±0.05°@≤±30°量程 | |
| D8 | 温度补偿 | -40~65℃温度补偿范围,温漂精度±0.05°@>±30°量程 | |
| D9 | 温度补偿 | -40~85℃温度补偿范围,温漂精度±0.05°@≤±30°量程 | |
| D10 | 温度补偿 | -40~85℃温度补偿范围,温漂精度±0.05°@>±30°量程 |